1. 面向弱势道路使用者的车载多目标跟踪和运动预测方法
-
研究背景
易受伤害道路使用者如行人、骑车人或其他骑行者,在实际交通场景中很常见,具有多样性,但易受伤害且缺乏保护。易受伤害使用者的检测是保护他们的第一步,需要进一步跟踪连续帧间的同一目标的位置,形成运动轨迹,实现多目标跟踪,为后续预测其运动意图做准备。
- 研究成果
针对自动驾驶环境中的自车周围易受伤害道路使用者(VRU,包括行人和骑行者两类)的运动轨迹预测问题,提出了融合多轨迹预测因子的深度循环神经网络轨迹预测方法,同时考虑连续多帧间目标的位置、形状等运动特征线索和局部矩形框的深度外观卷积特征。

在清华大学-戴姆勒联合研究中心建立的易受伤害道路使用者多目标轨迹预测数据库中,综合评价了不同的循环神经网络变体(RNN/LSTM/GRU)、目标轨迹预测因子以及网络参数优化策略,验证了所提出的融合多轨迹预测因子的VRU多目标轨迹预测方法的有效性。

- 代表作
研究骨干:熊辉
- Xiong H, Flohr F. B., Wang S, Wang, B, Wang, J, and Li, K. Recurrent Neural Network Architectures for Vulnerable Road User Trajectory Prediction[C].2019 IEEE Intelligent Vehicles Symposium (IV),IEEE, 2019: 171-178.
- Huang B, Xiong H, Wang J, Xu Q, Li X, and Li K. Detection-level fusion for multi-object perception in dense traffic environment[C].2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI),IEEE, 2017: 411-416.
2. 基于路侧相机的多目标跟踪方法
- 研究背景
精确鲁棒的多目标跟踪方法是智能网联汽车实现认知与决策的前提,在自动驾驶感知技术中占据重要地位。同时路侧相机同时具有成本低廉、感知信息丰富、视野开阔等突出优势,因此基于路侧相机的多目标跟踪方法对于实现车路协同感知及高等级自动驾驶具有重要意义。

3. 基于现有车载传感器的胎路附着系数实施估计方法
- 研究背景
胎路附着系数是描述当前胎路状态的重要参数,也是自动驾驶系统决策与控制算法的重要先验知识,对自动驾驶系统的安全性、舒适性具有重要意义。同时对于网联交通系统,附着系数估计结果可以实现共享,为驾驶员及自动驾驶系统提供预警,从而大大提升整个交通系统的安全系数。
- 研究成果
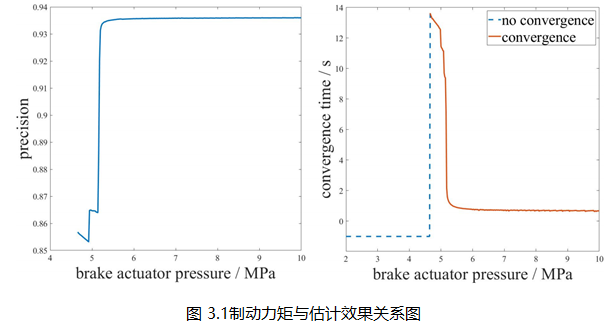
基于2D-LuGre轮胎模型及unscented Kalman Filtering,实现在制动、加速及转向三种驾驶工况下的胎路附着系数实时估计,并证明所建立轮胎系统的可观性条件,给出dynamic-based胎路附着系数估计方法的理论边界。通过CarSim-MATLAB/Simulink联合仿真,初步验证了所提方法的有效性。
- 代表作
研究骨干:林学武